方位精度(RMS):1°
横滚俯仰精度(RMS):0.1°@静态
0.3°@动态
IMU量程:0.01°/s
磁力计量程:±2Gs
接口:RS-232 RS-422
100%国产化
CGM304-ARHS航姿参考系统是北京信普尼科技有限公司自主研发的导航产品,国产化率达到100%。CGM304-AHRS航姿参考系统(以下简称CGM304-AHRS)包含3D惯性传感器组件(陀螺仪和加速度计)和3轴磁力计。拥有完全自主的融合算法,可以为多种复杂场景的应用提供连续、高精度的位置、航姿信息。
CGM304-AHRS是一款高精度、高实时性及高可靠性的航姿参考系统。
1.电气参数
特性 | 条件 | 最小 | 典型 | 最大 | 单位 |
供电电压 | 12 | 24 | 32 | V | |
工作电流 | 30 | 20 | mA | ||
存储温度 | -55 | 125 | ℃ | ||
工作温度 | -40 | 85 | ℃ |
2.性能指标
项目 | 条件 | 指标 | 单位 | |
方位精度(RMS) | 1 | ° | ||
横滚/俯仰精度(RMS) | 静态测试 | 0.1 | ° | |
动态测试 | 0.3 | ° | ||
IMU 指 标 | 陀螺量程 | ±300 | °/s | |
陀螺常温零偏稳定性 | 10秒平滑,1 σ | 0.01 | °/s | |
噪声密度 | 0.02 | º/s/√Hz | ||
加速度计量程 | ±16 | g | ||
加速度计零偏稳定性 | 10秒平滑,1 σ | 0.2 | mg | |
磁力计 | 量程 | ±2 | Gs | |
线性度 | 0.5 | % | ||
串口 | 数据输出频率 | 默认值 | 100 | Hz |
波特率 | 默认值 | 460800 | Bps | |
默认数据输出格式 | 数据格式1(长包) | |||
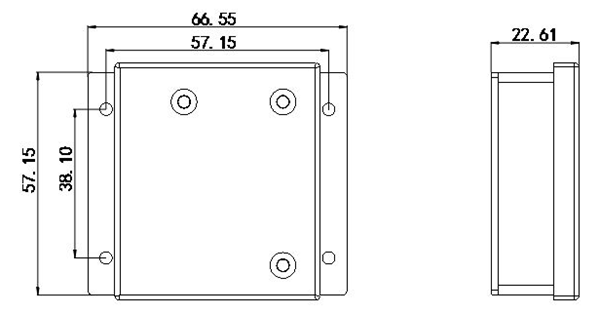
3.机械特性
连接器 | 引线输出(标准线长0.5m) | |
尺寸 | 66.55*57.15*22.61 | mm |